

基于MCS-51的Mifare智能IC卡讀卡器軟件設計
文章出處:http://5052h112.com 作者:林芊 ,朱延釗 人氣: 發表時間:2011年10月07日
0 引言
非接觸式Ic卡根據電磁感應原理,讀寫操作只需將卡片放在讀寫器附近一定的距離之內就能實現數據交換,無需任何接觸,使用非常方便、快捷,不易損壞。因此,在電子錢包、公路收費、公共汽車自動售票、門禁系統等方面有著廣泛的應用前景。目前,Philips公司的Mifare卡是該領域的主流產品,其較為成熟的型號為Mifarel IC$70(簡稱MF1 IC$70),遵從ISO/IEC14443A標準,支持一卡多用,具有極高的可靠性和保密性。
為配合Mifare卡工作,必須有相應的讀卡芯片,其中MF RC500就是典型的代表作。目前,由讀卡芯片制成的讀卡模塊以及外圍硬件電路已經相當成熟,而對軟件的開發卻相對滯后。本文正是以此為出發點,在典型的硬件電路上進行讀卡器的軟件設計,力求提高軟件的通用性和保證數據的穩定性。
1 MF1 ICS70卡的主要性能特點
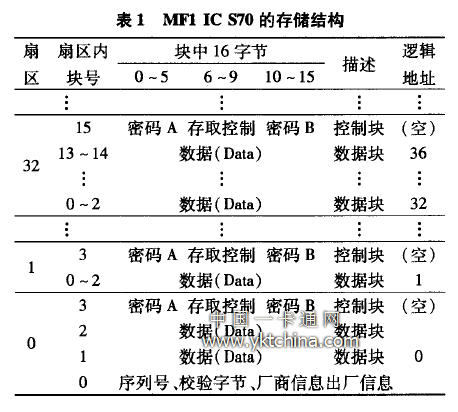
a)工作頻率13.56 MHz,傳輸速率106 kbit/s,讀寫距離最大1 00mm(取決于天線),工作溫度范圍一20℃ 一+50℃ ,具有防沖突機制,支持多卡操作。b)4 kB的EEPROM分為40個扇區:前2 kB分32個扇區,每個扇區分4塊;后2 kB分8個扇區,每個扇區分16塊(如表1所示)。IC卡以塊(Block)為存儲單位,每塊16 B,共256個塊,從扇區0的第0塊到扇區39的第15塊依次編號為塊0~255。
c)所有扇區各自獨立,每個扇區最后一塊為該扇區的控制塊,含有存取控制字節和兩組6B的密碼(Key A和Key B);其他塊為數據塊。扇區0的塊0用于存儲該Ic卡的序列號(32位)和廠商信息,這部分內容在Ic卡出廠時已被固化,因此這塊是寫保護的。
表1 MF1 IC$70的存儲結構
2 SPI接口通信
2.1 硬件描述
本電路采用性價比很高的ZLGS00A串行讀卡模塊來配合MF1 IC$70工作,其中集成了MF RC500讀卡芯片。采用三線SPI接口,半雙工通信方式,能夠與MCU直接連接。軟件設計的核心是針對SCLK、SDA—TA和ss這3個引腳。引腳說明及接口規范如表2所示。
表2 ZLG5OOA讀卡模塊SPI接口引腳說明
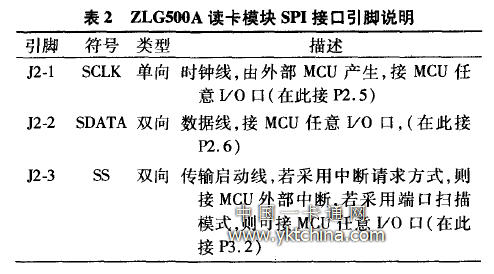
接口空閑時主機SS=1,SCLK=0,SDATA=0,從機SS=1,SCLK=1,SDATA:0。其中,SCLK為單向時鐘線,時鐘信號必須由MCU產生,由讀卡模塊接收,ss為雙向數據發送使能端,SDATA為雙向數據傳輸線,都由數據發送端控制,數據接收端必須釋放該線。
2.2 SPI信號波形
SPI信號必須嚴格遵守時序規范,否則將出現通信錯誤。無論數據傳輸的方向如何,SPI線上信號的波形總是如圖1所示。
由圖中可以看出,在ss為低電平時,時鐘和數據線上的信號才有效,且在SCLK為低時SDATA變化,SCLK為高時SDATA應保持穩定。
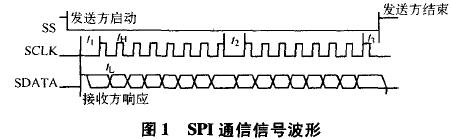
MCU必須根據數據傳輸的方向嚴格控制以下幾個時間,以確保數據傳輸無誤。
a)t1:數據接收器響應至MCU產生第1個SCLK上升沿的時間;
b)t2:兩個字節傳輸之間,SCLK低電平的持續時間;
c)t3:傳輸最后一個字節最后一位的SCLK信號的升沿至ss上升沿的時間;
d)tH:SCLK信號的高電平持續時間;
e)tL:SCLK信號的低電平持續時間。
2.3 SPI底層程序設計
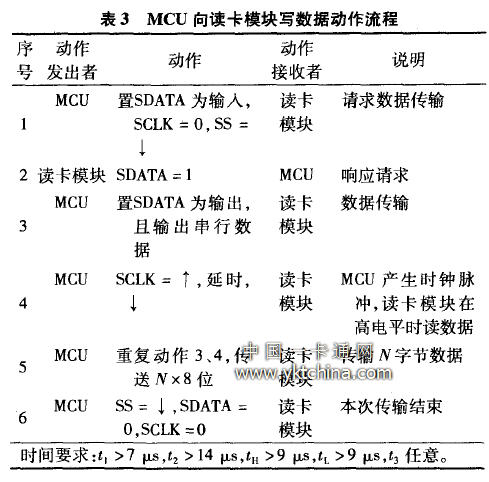
2.3.1 寫數據
MCU一讀卡模塊。除響應信號外,3根線上的信號全由MCU產生。如表3所示。
表3 MCU向讀卡模塊寫數據動作流程
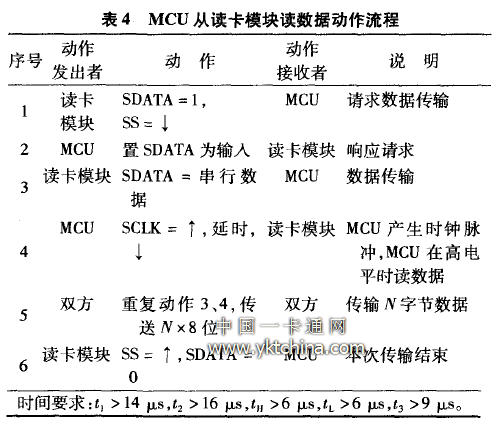
2.3.2 讀數據
讀卡模塊-MCU。響應信號和SCLK信號由MCU產生,ss信號和SDATA信號由讀卡模塊產生。如表4所示。
表4 MCU從讀卡模塊讀數據動作流程
3 存儲模式
由于實際應用中讀卡環境的隨意性,對卡的操作可能會造成數據丟失,例如在數據寫入的過程中Ic卡離開感應區等。因此,必須采取必要的措施來防止數據的丟失以及對丟失的數據進行恢復。為確保數據的穩定性,筆者對存儲模式和存取操作兩方面進行設計,在此先論述存儲模式的設計,而對于存取操作的設計將在第4節闡述。
3.1 存儲模式設計
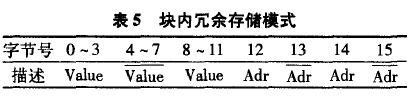
為防止數據的丟失以及為已丟失的數據提供恢復的藍本,在數據的存儲模式上采用兩層冗余存儲模式。第1層是塊內冗余存儲。寫入數據時按表5列出的格式,對塊值和塊地址進行冗余備份。數據(0—3號字節的Value或12號字節的Adr)讀出后,將其與備份值相對比,無誤后方可確認為真值;若有誤,則視為該塊數據出現“部分丟失”現象,須進行恢復。
表5 塊內冗余存儲模式
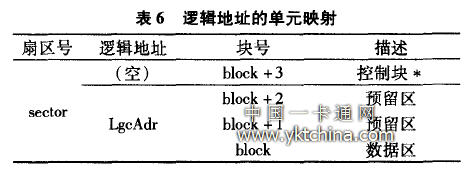
第2層是塊間冗余存儲。如表1所示,將4 kB的存儲空間分配給72個邏輯地址(LgeAdr),編號0—71,每個邏輯地址指向同一扇區內的3個數據塊(起始地址是扇區內的塊0)。為防止對控制塊的誤操作,每個扇區的控制塊不映射到邏輯地址中。如表6所示,邏輯地址中的第1個塊是數據區,用于正常存儲數據;第2個塊是備份區,用于備份數據區的內容,當數據區的內容發生“完全丟失”現象時,可以此作為恢復的藍本(具體操作在4.2節討論);第3塊為預留區,可在實際應用中記錄其他信息。
表6 邏輯地址的單元映射
3.2 地址變換函數
對Ic卡存儲空間的實際物理操作,僅僅通過邏輯地址是不可行的,所以必須進行地址變換,將邏輯地址變為相應的扇區號(sector)和塊號(block,指向低位塊)。具體函數如下:
uehar AdrTrans(uehar—LgeAdr,uehar 一sector,uehar 一block)
{if(-LgcAdr>’=72)return DATA_E111; //超出邏輯塊地址范圍,返回錯誤
else if(_LgcAdr<32) 一sector=一LgcAdr; //0—31號扇區
else -sector=(-LgeAdr一32)/5+32; //32—39扇區
block = _ LgcAdr 3 + 一sector; //轉換物理塊號
return DATA-OK;}
4 存取操作
對MF1 ICS70有讀、寫、加值、減值、存儲、傳輸共6種基本操作,它們在讀卡模塊自帶的函數庫中都有相應的實現函數。但是,這些函數并未考慮到數據穩定性的問題,所以僅僅調用它們是不夠的,必須在存儲的過程中加入保證數據穩定性的算法。讀和寫是上述6種基本操作中最基本的兩種操作,其他操作均可間接地通過它們來實現。下面在存儲模式的基礎上對存儲操作進行設計。
4.1 寫操作
數據的丟失往往發生在寫操作的過程中,寫入的不成功會導致數據丟失。根據存儲模式的設計,每一個邏輯地址可存放一個4字節的數據和1字節的地址,所以定義該數據為長整型(1ong),在讀、寫操作時須用單字節指針來對其進行轉存。具體操作是:先將long型操作數轉存人buf[0...3]位,將邏輯地址Lg-cAdr存人buf[12]位;再依據塊內冗余存儲模式對數據進行備份;最后將數據進行兩次發送,先發送到塊間冗余存儲模式的備份區,再發送到數據區,只要有一次發送成功則視為整個發送過程成功。程序如下:
uehar DamWrite(1ong 一Value,uehar—LgeAdr,uchar—block,
uchar idam _ bur)
{uehar temp=(uehar )_Value; //轉存指針
uehar writecheck:DATA— ERR; //寫入狀態標記,用于返回值
— buf[0]= (temp+3);-buf[1]= (temp+2);-buf[2]
= (temp+1);-buf[3]: temp; //數據轉存到緩沖區
_ buf[4]: 一buf[0];bull5]: 一—buf[1];—buf[6]= 一一
buf[2];_buf[7]=一_buf[3]; //值備份
_ buf[8]=一bur[0];一buf[9]=一buf[1];一buf[10]= 一buf
[2];_buf[11]=-buf[3];
_ buf[12]=一LgeAdr;_bull13]: 一一LgcAdr;_bull14]=一Lg·
cAdr;buf[15]=一一LgcAdr; //轉存地址,并備份
writecheck= writeeheck& mils_
write(一block+1,一bur); //
將數據寫入備份塊
writecheck= writecheck& mils— write(一block,一bur); //將
數據寫入數據塊
retum writecheck; //返回最終發送狀態}
4.2 讀操作
讀操作是不會引起數據丟失的,但在讀出數據后有必要對所讀出的內容進行校驗,確認其完整性后方可認定為真值,否則須予以修正。依據兩層冗余存儲模式,修正亦分為兩種:部分丟失恢復和完全丟失恢復。部分丟失恢復利用塊內冗余備份,真值的依據是:相同的數據為真值,即應有2份Value相同以及3份Adr相同,對出錯的那一份數據進行修正。由于寫操作中進行了兩次發送,卡內數據是安全的,當數據區內容“完全丟失”時,從備份區讀出數據來恢復數據區的內容。
具體的讀操作是:先從卡中讀出數據區內容,進行塊內數據正確性檢查及糾錯;然后判斷數據是否“完全丟失”,若否,則可確認為真值,若是,則從備份區讀出數據;最后根據存儲模式的格式對讀出內容進行轉換。程序如下:
uchar DataRead(1ong -Value,uchar$~LgcAdr,uchar—block,
uchar idata $一buf)
{uchar$temp=(uchar$)-Value;//轉存指引‘
if(mifs_read(一block,一buf)!=0)return DATA~ERR; //讀卡
DataCheck(一buf); //數據正確性檢查及糾錯
//若數據為全0,視為數據丟失;此時從備份塊中濱取數據
if(-buf[0]==0&&-buf[1]==0&&-buf[2]==0&&-
buf[3]==0) mifs—read(_block+1,buf);
(temp+3)=_bufEo];$(temp+2)=—buf[1];$(temp+1 1)
= -bull2];$temp=一buf[3];//值轉換
LgcAdr=~ buf[12];//讀出邏輯地址
return DATA— OK;}
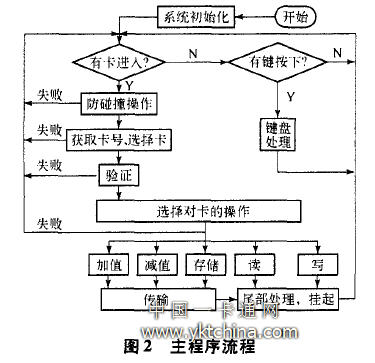
5 主程序流程
6 結束語
本文在Mifare智能Ic卡應用的典型電路上進行軟件設計,程序的讀寫效率和數據穩定性都達到很高的要求。算法及程序的通用性好,可移植到不同的電路系統中,根據實際應用稍加修改即可滿足要求。本文主要從通用的角度進行設計,在實際具體應用中應根據需要添加必要的輔助程序,如存儲器擴展、LCD顯示、語音提示等。非接觸式Ic卡讀卡系統具備迅速、方便、安全、可靠、穩定等優點,目前正逐步取代傳統磁卡和接觸式IC卡,具有巨大的市場競爭力和廣闊的發展前景。
(作者單位:華南理工大學物理科學與技術學院,華南理工大學計算中心)








