

CPLD在射頻卡讀寫器中的應用
文章出處:http://5052h112.com 作者:江美龍 于興啟 畢慧玲 沈樹群 人氣: 發表時間:2011年10月22日
1 系統工作原理和CPLD特性
射頻卡讀寫系統又稱射頻識別系統(Radio Frequency Identification),它是利用無線方式進行非接觸式雙向數據通信,進而達到識別目標并交換信息的目的。射頻識別技術發展迅速,在門禁、交通這、防盜、金融、身份證管理、工業自動化等方面有著廣泛的應用前景。按照相關標準,非接觸IC卡可以分為3種:(1)密耦合卡(ISO10536),作用距離0~1cm。(2)近耦合卡(ISO 14443),作用距離0~10cm。(3)疏耦合卡(ISO 15693),作用距離0~150cm。
基于ISO 15693協議標準設計的射頻卡讀寫器是目前中低頻段工作距離最遠(達1.5米)的射頻識別裝置。射頻卡由半導體廠商提供,目前國內外均有符合該標準的商用化射頻卡。
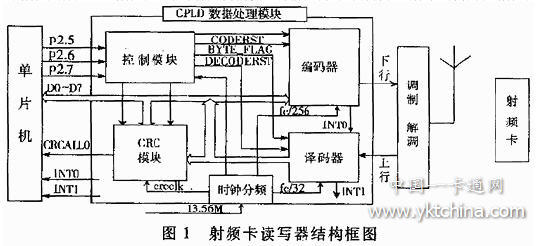
讀寫器和射頻卡之間的數據交換主要有兩種:(1)下行數據是讀寫器向射頻卡發送的具有固定幀格式的指令和數據:(1)上行數據是射頻卡響應讀寫器指令后返回的數據。讀寫器分前端收發模塊和后臺數據處理模塊。本文主要涉及數據處理部分,其主要功能有:指令裝配、下行數據編碼(讀寫器→卡)、上行數據解碼(卡→讀寫器)以及差錯控制模塊。射頻卡讀寫器結構如圖1所示。
在實際應用中,密耦合卡和近耦合卡距離射頻卡讀寫器作用距離特別小,一般每次只要求響應一張卡(如公交售票系統)。而疏耦合卡往往應用在對多卡同時進行響應的場合(如多個持卡行李同時經過門檢),讀寫器與多卡同時進行數據交換可以通過軟件設計加入“防碰撞機制”實現。但是由于讀寫器在響應某張卡時的數據交換時間被限制在200μs~300μs內,選用普通單片機無法達到這一要求,因此在設計中選用了高速CPLD器件來實現編碼、解碼以及差錯控制功能。一方面在響應時間上滿足了實際應用的需要;另一方面簡化了軟件設計。
CPLD是從PAL和GAL發展起來陣列型高密度PLD器件,內部由可編程邏輯宏單元、可編程I/O單元、可編程內部連線構成。它們大多采用E2PROM和FLASH閃存工藝,掉電后編程信息不丟失[2]。器件性能可以滿足不同場合的需要,如XILINX.htm" target="_blank" title="XILINX貨源和PDF資料">XILINX公司XC95XL系列CPLD具有低功耗特性,輸出電壓2.5V/3.3V,端到端延時5ns,系統最高工作頻率可達178M[3]。目前CPLD器件被廣泛應用于代替中小規模數字電路,提高系統的可靠性、抗干擾性能和處理速度。通過管腳鎖定和預留切換端口,可以在不改動原PCB電路板的基礎上對模塊的功能進行修改和完善,給調試帶來方便。
2 功能模塊實現
2.1 編碼器與譯碼器
單片機啟動編碼后,編碼模塊向單片機發中斷(INT0)獲取待編碼的指令數據,同時將指令數據送入并行CRC模塊。當指令數據完成編碼后,控制電路將2字節CRC值緊接在數據之后進行編碼。譯碼時,譯碼器檢測到起始位后,開始譯碼。譯碼后的數據通過中斷(INT1)通知單片機取走。并同時送入CRC并行運算模塊進行校驗,單片機在特定的時刻(接收完最后一字節數據時)讀取CRC校驗標志端口CRCALL0,判斷整個數據串的正確性。
編譯碼的數據格式如下:
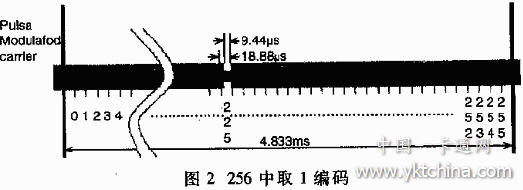
(1)數據編碼 從讀寫器到卡的數據采用脈沖位置調制即“1/256”編碼。用256個時隙表示8bit數據,通過控制bit脈沖出現的時間位置來表示0~255范圍內的數據。如圖2,在第255個位置出現的位置脈沖(9.44μs高電平的9.44μs低電平)表示數據E1(HEX),采用計數器加控制電路即可實現。控制部分協助實現數據無縫編碼及形成幀起始位和結束位,用VHDL設計易于實現。編碼后的數據進行ASK調制(13.56MHz載波),經天線發射出去。
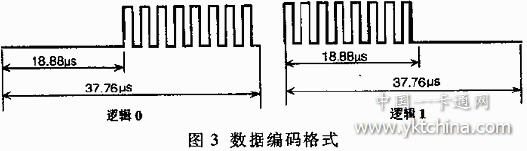
(2)數據譯碼 從射頻卡返回的數據經過一次解調(去掉13.56MHz載波)后,數據編碼格式如圖3所示。可以直接進行數據譯碼,也可以去除子載波(423.75kHz)后得到Manchester碼再譯碼。這里采用后者,通過在每一bit的前、后半段時間內兩次取樣、判決、加以串并變換即可得到譯碼后的并行數據并送至并行CRC模塊進行CRC校驗,同時送往單片機處理,行CRC模塊在校驗結束時通知單片機取校驗結果。
2.2 差錯處理模塊
與射頻卡內部電路配合,讀寫器端采用了常用的CRC檢錯得傳機制。為了縮短處理時間,滿足讀寫器在實際應用中對多張卡同時處理時的響應時間要求,設計采用硬件實現。
計算下行數據的CRC值以及對上行數據進行CRC校驗,實際上都是完成數據的CRC計算,二者可以共用一個模塊,通過控制部分協調分工。通常CRC采用性反饋移位寄存器串行實現(見圖4),這里提出了一種并行計算CRC的方法,具有更高的處理速度,使讀寫器對響應時間縮短。
CRC-CCITT算法生成多相式為:x 16+x 12+x 5+1[4]。計算CRC實際上是將數據通過線性反饋移位寄存器,所有數據移入后CRC寄存器的值即為16位CRC值。并行CRC運算模塊每次輸入8位數據,相當于一次并行運算就得到了串行移位運算時需要8位移位所得的結束。由表1~表4可以知道并行CRC實現的原理:每個時鐘到來時完成8bit數據CRC值計算;下一個8bit數據到來時,把上一個8bit數據的CRC值C15~C0作為初值,繼續完成并行CRC計算。即每次處理一個字節。
表1 移位前CRC寄存器值(初值)
| R15 | R14 | R13 | R12 | R11 | R10 | R9 | R8 | R7 | R6 | R5 | R4 | R3 | R2 | R1 | R0 |
| C15 | C14 | C13 | C12 | C11 | C10 | C9 | C8 | C7 | C6 | C5 | C4 | C3 | C2 | C1 | C0 |
表2 1次移位后CRC寄存器值
| R15 | R14 | R13 | R12 | R11 | R10 | R9 | R8 | R7 | R6 | R5 | R4 | R3 | R2 | R1 | R0 |
| X0 | C15 | C14 | C13 | C12 | C11 X0 |
C10 | C9 | C8 | C7 | C6 | C5 | C4 X0 |
C3 | C2 | C1 |
表3 2次移位后CRC寄存器
| R15 | R14 | R13 | R12 | R11 | R10 | R9 | R8 | R7 | R6 | R5 | R4 | R3 | R2 | R1 | R0 |
| X1 | X0 | C15 | C14 | C13 | C12 X1 |
C11 X0 |
C10 | C9 | C8 | C7 | C6 | C5 X1 |
C4 X0 |
C3 | C2 |
表4 8次移位后CRC寄存器值
| R15 | R14 | R13 | R12 | R11 | R10 | R9 | R8 | R7 | R6 | R5 | R4 | R3 | R2 | R1 | R0 |
| X7 X3 |
X6 X2 |
X5 X1 |
X4 X0 |
X3 | X7 X2 |
X6 X1 |
X5 X0 |
C15 X4 |
C14 X3 |
C13 X2 |
C12 X1 |
C11 X7 X0 |
C10 X6 |
C9 X5 |
C8 X4 |
表中參數說明:Ri為CRC移位寄存器值(R0為低位),Ci為CRC移位寄存器初值(C0為低位),Di為輸入數據(D0為低位),Xi=Di XDR Ci,同一欄中數據的運算關系是異或(XOR)。
每次并行數據到來時,各CRC寄存器值按表4運算關系更新。最后一個字節數據輸入后CRC寄存器的值(R0~R15)即為該數據組的CRC值。模塊設計采用了VHDL語言,同步更新R0~R15寄存器的值,從表中看出,一次CRC計算最多完成4組XOR運算。如:R3<=C11 XOFR D7 XOR C7 XOR D0 XOR X0;R15<=D7XOR C7 XOR D3 XOR C3。
3 控制模塊
單片機擴展了RAM后,P2口只有P2.5~P2.7可以用來提供控制信號,不能滿足需要,因而在CPLD內部將3路信號擴展為8路控制信號,以實現對各部分進行協調控制。主要有編碼器和譯碼器的啟動信號、復位信號、指令標志信號、CRC輸出信號等控制信號。
4 性能分析
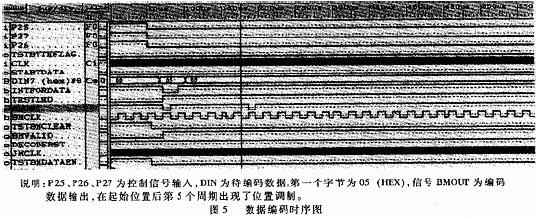
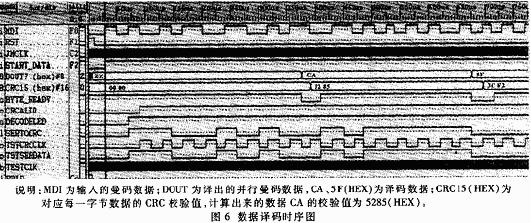
這里選用1片XILINX XC95144實現整個數據處理模塊的功能,使用軟件平臺是XILINX.htm" target="_blank" title="XILINX貨源和PDF資料">XILINX Foundation 3.1i。XC95144內部有144個宏單元、3200可用門。圖5和圖6分別給出了編碼器和譯碼器的部分時序仿真結果及其說明。可以看到,二者均實現了協議要求,編碼器在準確的位置實現脈沖位置調制,譯碼器能準確地對曼徹斯特碼數據進行譯碼,并計算出輸入數據的CRC值。
用AT89C51單片機提供編碼數據以及模擬待譯碼曼碼數據流對模塊功能進行實測,用示波器觀察各測試點信號,結果基本上與時序仿真的波形圖相同,達到了預期設計的目標。
本文較系統地介紹了一類遠距離射頻卡讀寫器數字處理模塊的設計,特別在于:(1)采用單片CPLD實現了射頻卡讀寫器數字模塊功能,采用了原理圖和VHDL相結合自頂向下的設計方法[2][5],樣機PCB版面積小,開發周期短,性能穩定。其設計方案和思路對其他類別射頻卡讀寫器設計具有一定的參考價值。(2)提出了一種快速實現CRC-CCITT的并行運算方法,該方法適用于高速數據傳輸場合。
為了提高系統的安全性,可以對對寫入卡中的數據進行加密處理,即引入數據加密模塊,并將整個設計配置到一片容量更大的CPLD或FPGA中。
作者:北京郵電大學電子工程學院智能信息處理實驗室(100876)江美龍 于興啟 畢慧玲 沈樹群








