

基于MSP430的防尾隨門禁系統設計
文章出處:http://5052h112.com 作者: 人氣: 發表時間:2013年02月09日
摘要:針對某些安全等級較高的場所的門禁系統需要防止刷卡一次多人尾隨進入、一卡多刷以及對進入場所的人員數據進行遠程網絡化管理的情況,介紹了1種基于MSP430的防尾隨門禁系統,提出了運用接近傳感器與稱重傳感器相配合,并結合門禁卡的數據信息進行防尾隨控制,通過稱重傳感器檢測的體重數據與數據庫中的重量數據相比對,確定現場采集的數據是否在正常范圍內,控制通道開關裝置的開閉,利用網絡進行數據的遠程傳輸和各門禁系統之間數據的交互更新,從而提高了門禁系統的安全性。
0 引 言
隨著經濟社會的發展,人們越來越注重安全防范,門禁系統是目前被廣泛使用的安全設施之一。但傳統的門禁系統已經不能滿足現在社會的發展和安全防范的需要。近幾年非接觸式射頻門禁卡系統被廣泛應用于各個領域,取得了很好的防范效果。
但是僅采用門禁卡進行信息的識別和確認存在一定的問題。如果在1個人刷卡正常進出門的時候,其他人趁門開啟的間隙尾隨進出,大多數的門禁卡控制系統無法對這種尾隨動作做出正確判斷[1]。因此,出于安全防范的整體性考慮,如何保證每次刷卡都只有持卡人本人通過,這就涉及到了防尾隨問題。在有的對安全要求較高的大型場所,往往其出入口也不止1個,這時候單個門禁的數據就要及時的同其余門禁的數據進行實時更新,以滿足于人員從1個門進,從另1個門出的這種情況,這就需要各個門禁間的數據進行交互更新。本文給出了1種基于MSP430的防尾隨門禁系統的設計,運用位置傳感器與稱重傳感器相結合,并配合門禁卡的數據信息進行防尾隨控制,同時將各個通道門禁系統通過網口連接進行數據交互更新,很好的解決了這些問題。
1 防尾隨門禁系統電路設計
1.1 防尾隨門禁系統電路原理
防尾隨門禁系統的電路原理如圖1所示。數據處理電路接收讀卡器的輸入信號,控制電磁鐵實現裝置的開閉,在人員通過通道的過程中采集稱重數據,與數據庫內對應識別信息相比對。如果現場采集的數據在正常范圍內,則機構正常動作,原數據庫重量數據與采集的數據取均值后更新數據庫;如果現場采集的重量數據不在正常范圍內,則鎖閉裝置,發出報警信號,原數據庫內數據不更新。
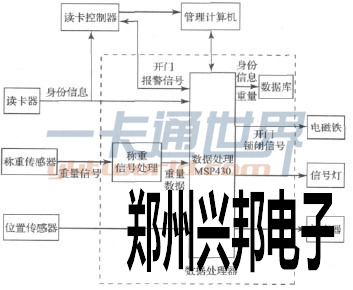
圖1 防尾隨門禁系統原理
1.2 控制單元的硬件設計
該系統的總體設計思路為:采用上/下位機結構,上位機選用普通的PC作為服務器,下位機采用低功耗、高性能的單片機設計,作為門禁系統的客戶端,主要包括電源模塊、數據處理和控制模塊、重量信號采集模塊和網絡模塊等幾個部分。
1.2.1 數據處理和控制模塊:數據處理和控制芯片采用美國德州儀器(TI)公司的低功耗、高性能16位單片機MSP430F149[2]。該芯片具有運行速度快、處理能力強、超低功耗等優點,其工作電壓為1.8~3.6V;采用了精簡指令集,大量的寄存器以及片內數據存儲器都可參加多種運算;MSP430F149中斷源較多并且可以任意嵌套,從省電狀態喚醒系統只需要6μs;它還具有豐富的片上外圍模塊,其12位A/D轉換器帶有內部參考源、保持采樣、自動掃描等特性;16位定時器具有4種工作模式,可同時進行多個捕獲/比較功能;有48個可獨立編程的I/O口;2個串行通信接口USART0與USART1;具有60多KB的Flash存儲器,可擦寫10萬次;具有JTAG調試口,可以在線對單片機進行下載和調試[3-5]。
1.2.2 重量信號采集模塊:重量信號采集部分電路要實現對應變片傳感器信號濾波放大并且進行A/D采樣的功能,人員踏上稱重平臺開始采樣,轉柵原始位置傳感器信號斷時結束采樣,人員重量計算采用去掉極大值和極小值后取平均值的方法,稱重精度誤差在5%以內。本文采用差分信號的專用集成芯片AD7705來進行重量信號的處理,重量采集模塊原理如圖2所示。
圖2 重量采集模塊原理
AD7705是集可控濾波器、差分放大和16位高速A/D轉換于一體的專用差分信號處理及采集芯片,它具有分辨率高、增益可編程、動態范圍廣、自校準、功耗低等特點[6]。ADD7705采用Σ-Δ轉換技術,有2個模擬通道,片內帶可編程數字濾波器,抗干擾性強,分辨率高,穩定性好。它同微控制器的接口也是通用的SPI、micro wire串口協議,接口方便[7-8]。
1.2.3 網絡模塊:各門禁系統之間要進行信息的交互更新,就需要通過網絡部分相連。本文設計的防尾隨系統要實現的網絡功能就是將人員進出的實時數據上傳到上位機并且由上位機來組織數據對各個通道數據庫進行及時更新。該部分電路屬于高速數字模塊,需要采取相應的抗干擾措施防止其對模擬部分等電路造成干擾并且TCP/IP協議本身是比較復雜的[9]。
本文采用1款多功能的單片網絡接口芯片W5100來實現,其內部集成有10/100以太網控制器,并且集成了全硬件的TCP/IP協議棧、以太網介質傳輸層(MAC)和物理層(PHY)[10]。硬件TCP/IP協議棧支持TCP、UDP、IPv4、ICMP、ARP、IGMP和PPPoE,這些協議都在很多領域經過了多年的應用。W5100內部還集成有16KB存儲器用于數據傳輸,它提供了3種接口:直接并行總線、間接并行總線和SPI總線,使得W5100與MCU 接口非常簡單,就像訪問外部存儲器一樣[11-12]。使用W5100不需要考慮以太網的控制,只需要進行簡單的端口(Socket)編程,從而降低了網絡部分設計的難度。
1.2.4 各信號間的隔離:該系統中需要接入多種傳感器信號(韋根信號、接近傳感器信號、稱重傳感器信號)以及要輸出控制繼電器等。這些輸入信號和控制信號的供電范圍各不相同且繼電器之類的期間電磁干擾也比較厲害,對重量傳感器信號的采集極為不利。因此在設計這些接口部分時一定要做好隔離措施,本文采用TLP521光電耦合器件來實現各種信號的隔離輸入和輸出[13]。TLP521是可控制的光電耦合器件,主要優點是單向傳輸信號,輸入端與輸出端完全實現了電氣隔離,抗干擾能力強,使用壽命長,傳輸效率高。它廣泛應用于電平轉換、信號隔離、級間隔離、開關電路、遠距離信號傳輸、脈沖放大、固態繼電器(SSR)、儀器儀表、通信設備及微機接口中,可以增加系統的安全性,減小電路干擾,優化電路設計。
2 防尾隨門禁系統工作原理
防尾隨門禁系統的1個通道包括進門和出門2個方向,各有1個讀卡器和電磁鐵控制,各有1個信號燈指示狀態,出門方向設置了1個按鈕,作為手動開門的備用控制。平時信號紅燈亮,電磁鐵吸合時,對應的信號綠燈亮,信號紅燈滅。通道底部放置1個進出門共用的稱重裝置。頂部有3個位置檢測開關,轉柵順時針旋轉時,1號接近開關信號為出門電磁鐵斷電控制信號;轉柵逆時針旋轉時,3號接近開關信號為進門電磁鐵斷電控制信號。2號接近開關為原點位置檢測,沒有信號時,轉柵沒有回位,電磁鐵不能動作。位置檢測開關原理如圖3所示。
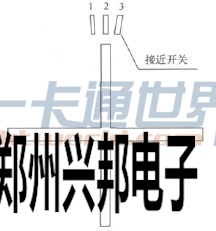
圖3 位置檢測開關原理
人員刷卡后,讀卡器的韋根26信號輸入進控制電路后需經電路處理分成2路,1路供數據處理電路使用,1路發送給讀卡控制器使用。讀卡控制器識別卡的信息后,發出1個進門信號給數據處理電路,此信號為繼電器干接點信號。數據處理電路接到進門信號后,檢測轉柵是否在原點,如果轉柵在原點,控制對應的電磁鐵吸合,以及對應的信號綠燈亮,并發出提示音“請進”;如果轉柵不在原點,數據處理電路不接受進門信號,回到等待狀態。數據處理電路將接收的卡信息在數據庫內查詢,比較是否是參觀人員,如果識別卡是參觀卡,不做任何處理。如果識別卡是普通卡,數據處理電路計算人員重量是否超過閾值;如果超過閾值,則釋放電磁鐵,對應的信號紅燈亮,發出提示音“識別失敗”,并發出1個繼電器信號作為報警信號,數據庫內數據不更新;如果不超過閾值,則保持電磁鐵吸合,將采集的重量數據與原數據取平均值后更新數據庫,人員通過。這種方法可有效的檢測到持卡人體重信息,防止有人尾隨進入。
3 軟件設計
圖4為軟件設計主流程圖,系統上電復位初始化,讀卡器等待刷卡,刷卡后,讀卡器讀取韋根信號識別卡的信息,識別通過后發出1個開門信號給數據處理電路,控制繼電器開門。同時數據處理電路將接收到的韋根信號信息在數據庫中進行查詢比對,是參觀人員的話直接通過閘機,關門,不是參觀人員則調用稱重防尾隨子程序,獲取稱重傳感器的重量數據與數據庫中存儲的持卡人體重進行比對,符合設定范圍的通過閘機,關門,并在數據庫中更新體重信息,超出設定范圍的報警,關門,等待下一次刷卡。
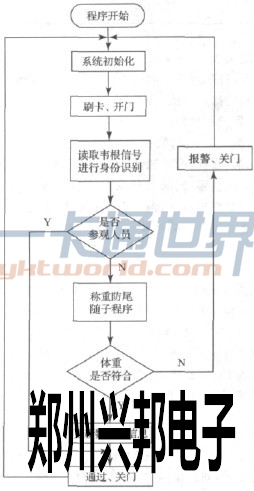
圖4 軟件流程
對于上位機的編程運用VC++實現,具體的程序設計本文不再詳細介紹。
4 結論
本文設計的基于MSP430防尾隨門禁系統應用于某電廠各高危區域的進出通道控制,并進行了調試測試。
作者簡介:王煜,1988年出生,東華大學碩士研究生,主要從事嵌入式應用系統設計方面的研究,機械零件圖像處理與識別等。E-mail:[email protected]
【稿件聲明】:如需轉載,必須注明來源和作者,保留文中圖片和內容的完整性,違者將依法追究。








